ตรวจประเมินโครงสร้าง
กระบวนการตรวจสอบ วิเคราะห์ และประเมินโครงสร้างทางวิศวกรรม เช่น บ้าน อาคาร สะพาน หรือโครงสร้างอื่นๆ เพื่อพิจารณาว่าโครงสร้างนั้นยังมีความแข็งแรงเพียงพอ สามารถใช้งานได้อย่างปลอดภัย หรือต้องดำเนินการซ่อมแซม หรือดำเนินการเสริมกำลังในส่วนใดหรือไม่
1. การตรวจสอบด้วยสายตา
(Visual Inspection)
เป็นขั้นตอนพื้นฐาน ใช้ประเมินสภาพเบื้องต้นและระบุตำแหน่งที่ควรตรวจละเอียดเพิ่มเติม เช่น ตรวจสอบรอยร้าว การแตกร้าว การโก่งตัว การกัดกร่อน การเกิดสนิมของเหล็กเสริม การหลุดร่อนของคอนกรีต เป็นต้น

2. การตรวจวัดและสำรวจภาคสนาม
(Field Measurement / Survey)
เป็นการวัดขนาดจริงของโครงสร้างหรือองค์อาคารด้วยเครื่องมือทางวิศวกรรม เช่น ความเอียง การทรุดตัว การโก่ง การตรวจตำแหน่งและรายละเอียดโครงสร้างจริงเทียบกับแบบ

3. การทดสอบแบบไม่ทำลาย
(Non-Destructive Testing: NDT)
เช่น Rebound Hammer, Ultrasonic Pulse Velocity, Ground Penetrating Radar (GPR) ใช้ประเมินคุณภาพวัสดุ ความหนาแน่น รอยร้าวภายใน โดยไม่ทำให้โครงสร้างเสียหาย

4. การทดสอบแบบกึ่งทำลายหรือทำลาย
(Semi-Destructive / Destructive Testing)
โดยการเจาะ (Core Test) หรือ เก็บตัวอย่างคอนกรีตจากหน้างานจริงมาทำการทดสอบ (Sample Test)

5. การวิเคราะห์โครงสร้าง
(Structural Analysis)
โดยใช้ Analysis software ที่ทันสมัย และตามมาตรฐานทางวิศวกรรม โดยข้อมูลจากการตรวจสอบและการทดสอบมาใช้ประกอบในคำนวณความสามารถในการรับน้ำหนักของโครงสร้าง

6. การทดสอบการรับน้ำหนัก
(Load Test)
เป็นการทดสอบโครงสร้างโดยการใส่น้ำหนักจริงหรือจำลองน้ำหนักบรรทุก เพื่อประเมินความสามารถในการรับน้ำหนักของโครงสร้าง หรือพฤติกรรมการโก่งตัว การแตกร้าว เป็นไปตามที่ออกแบบไว้หรือไม่

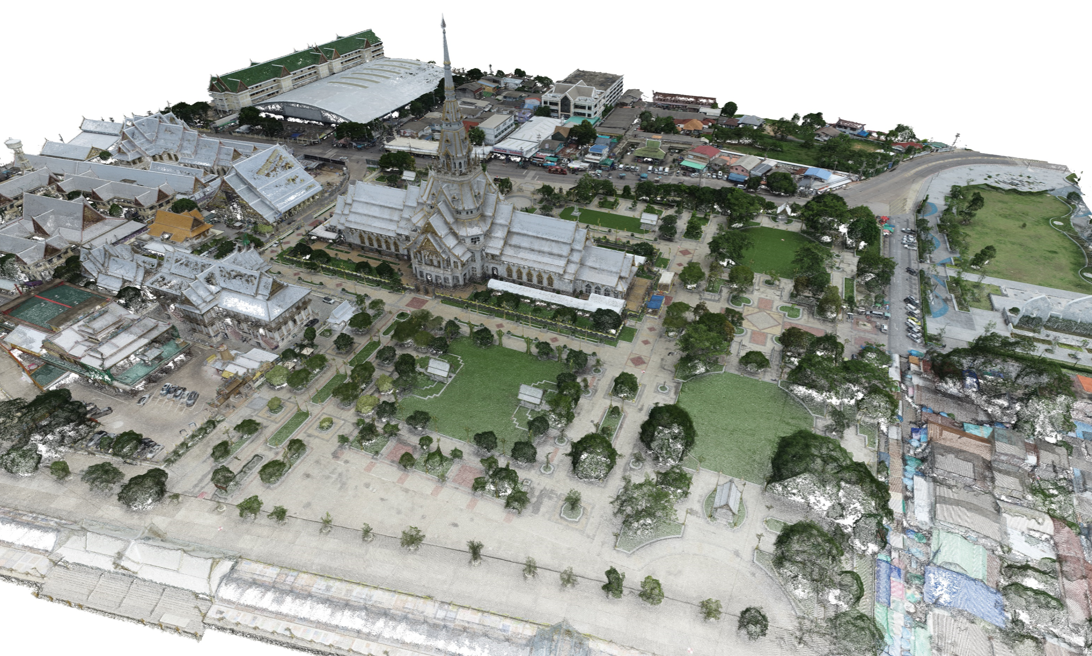
7. การสำรวจและตรวจสอบหน้างานด้วยการสแกน
(Site Survey / Inspection – Scan Technology)
เป็นการสำรวจและตรวจสอบโครงสร้างโดยใช้เทคโนโลยีการสแกนขั้นสูง เพื่อเก็บข้อมูลรูปแบบ ขนาด ตำแหน่ง และสภาพของโครงสร้างจริงอย่างแม่นยำ เช่น อาคาร โรงงาน เครื่องจักร สะพาน อุโมงค์ และโครงสร้างอื่น ๆ โดยข้อมูลที่ได้สามารถนำไปใช้ในการวิเคราะห์ ประเมินสภาพ ออกแบบ ซ่อมแซม และปรับปรุงโครงสร้างได้อย่างมีประสิทธิภาพ
- UAV / Drone Survey for Layout & General Mapping — สำรวจผัง แนว ขอบเขต และสภาพพื้นผิวทั่วไปจากมุมสูง
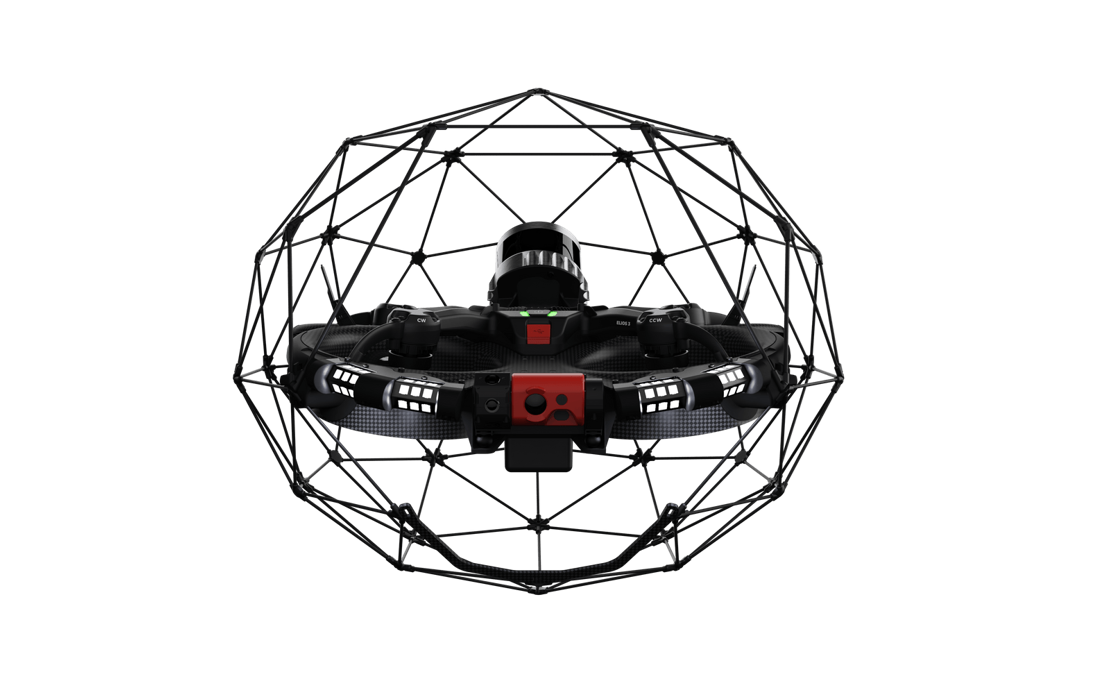
- Confined-Space UAV (Protective-Cage Drone) — โดรนกรงสำหรับสำรวจพื้นที่อับอากาศ พื้นที่ใกล้เครื่องจักร หรือใต้โครงสร้าง
- 360° Imaging System (Tripod-based) — กล้องบันทึกภาพหน้างานแบบ 360 องศา เพื่อเก็บสภาพพื้นที่และบริบทโดยรอบ
- Wearable Mobile Scanner (Helmet-mounted) — สแกน 3 มิติแบบเคลื่อนที่ด้วยอุปกรณ์สวมใส่ เพื่อความคล่องตัวในการเก็บข้อมูล
- Handheld LiDAR Scanner — ระบบสแกนและทำแผนที่แบบพกพา เหมาะสำหรับพื้นที่ที่ต้องการความรวดเร็วและยืดหยุ่นในการสำรวจ




8. การประมวลผลข้อมูล
(Data Processing)
เป็นขั้นตอนการนำข้อมูลที่ได้จากการสำรวจหรือการสแกนหน้างานมาทำการประมวลผล วิเคราะห์ และจัดรูปแบบข้อมูลอย่างเป็นระบบ เพื่อให้สามารถนำไปใช้งานต่อได้อย่างมีประสิทธิภาพ
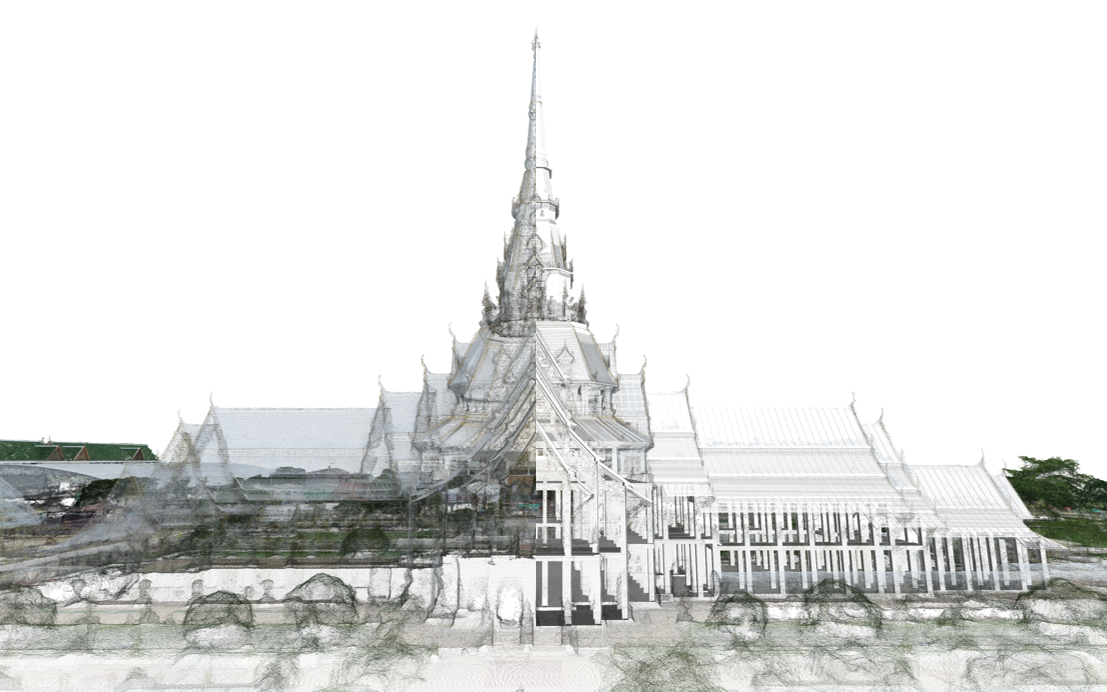
- การประมวลผลข้อมูล Point Cloud (Point Cloud Processing) — เป็นการนำข้อมูลที่ได้มาประมวลผล โดยทำการจัดแนวและเชื่อมต่อชุดข้อมูลจากการสแกนแต่ละตำแหน่งเข้าด้วยกัน เพื่อให้ได้ชุดข้อมูล Point Cloud ที่มีความต่อเนื่องและถูกต้อง
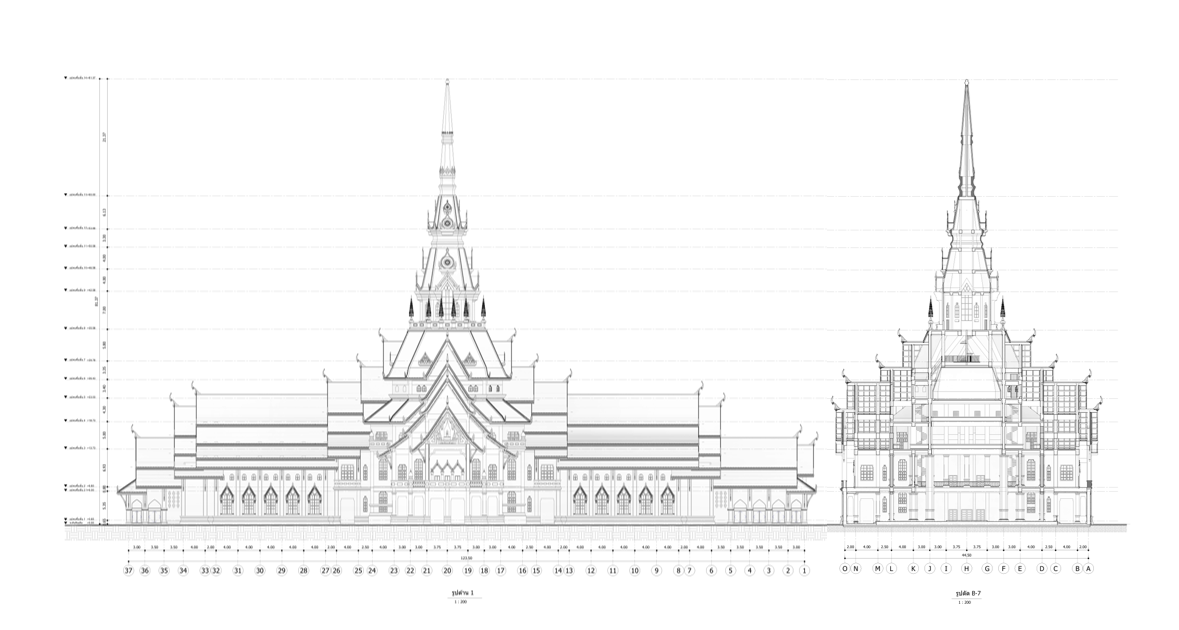
- การจัดทำแบบ 2 มิติ (2D CAD Deliverables) — เป็นการแปลงข้อมูลจากการสแกนให้เป็นแบบทางวิศวกรรมในรูปแบบ 2 มิติ เช่น แปลน (Plan) รูปด้าน (Elevation) รูปตัด (Section) และผัง Layout เพื่อใช้เป็นข้อมูลสำหรับการออกแบบ วางผัง หรืออ้างอิงในการดำเนินงาน
- การสร้างโมเดล 3 มิติ BIM จากข้อมูลสแกน (Scan to 3D BIM Modeling) — เป็นการนำข้อมูลจากการสแกนมาสร้างเป็นโมเดลอาคารหรือโครงสร้างในรูปแบบ 3 มิติ (BIM Model) เพื่อใช้ในการวิเคราะห์ ออกแบบ ประสานงานงานก่อสร้าง หรือบริหารจัดการข้อมูลอาคารได้อย่างมีประสิทธิภาพ